Ref: 1901



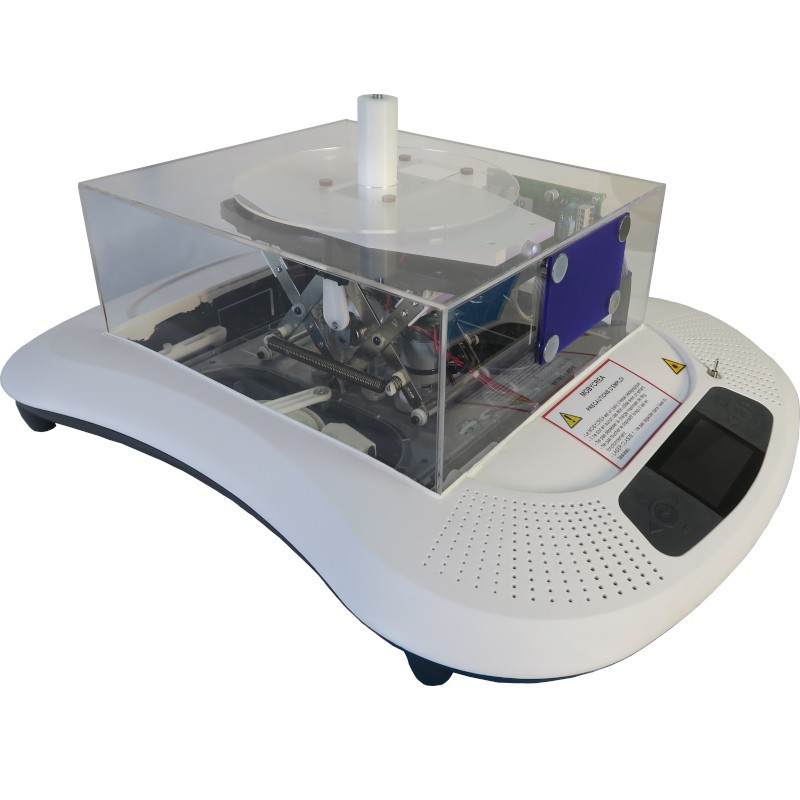
Berceur Didactisé pour études Mécaniques et Asservissement en Sciences de l'Ingénieur.
Produit innovant, présentant un thème universel et particulièrement adapté pour les Sciences de l'Ingénieur, le MobyCrea élargit la vision de la technologie!
Les conceptrices du transat berceur ont choisi des trajectoires de déplacement latéral tout en assurant une variété de mouvements de bercements dans le respect du confort et de la sécurité de bébé.
Nous nous placerons donc ici dans un cadre de validation en laboratoire de la version ‘’MobyCREA’’, avec instrumentation de contrôles et de mesures.
Définition de trajectoires idéales souhaitées dans le cahier des charges
Analyse de conformité de comportement du système retenu par le constructeur
Les indispensables :
Berceur Didactisé pour études Mécaniques et Asservissement en Sciences de l'Ingénieur.
Produit innovant, présentant un thème universel et particulièrement adapté pour les Sciences de l'Ingénieur, le MobyCrea élargit la vision de la technologie!
Les conceptrices du transat berceur ont choisi des trajectoires de déplacement latéral tout en assurant une variété de mouvements de bercements dans le respect du confort et de la sécurité de bébé.
Nous nous placerons donc ici dans un cadre de validation en laboratoire de la version ‘’MobyCREA’’, avec instrumentation de contrôles et de mesures.
Définition de trajectoires idéales souhaitées dans le cahier des charges
Analyse de conformité de comportement du système retenu par le constructeur
Les indispensables :
Vous aimerez aussi

CREA SLIDER REV2
Système de Traveling Video Professionnel à deux axes asservis avec étude de basculement.
Ref: 2732
En savoir plus
Pilote automatique TP32
Pilote automatique électrique de barre franche pour Voilier
Ref: 1941
En savoir plus
Berceur Didactisé pour études Mécaniques et Asservissement en Sciences de l'Ingénieur.
